Calibration File
Mittels Calibration file können Grundeinstellungen eines Frontends modifiziert werden. Dazu gehören u.a. Sensitivity Werte von Ein- und Ausgängen, die individuell zwischen Geräten leicht schwanken können. Es ergibt sich damit die Möglichkeit einen sehr präzisen und individuellen Abgleich eines physikalischen Gerätes vorzunehmen. Da das File menschenles- und editierbar ist, genügt es auch Anforderungen an die Dokumentation von Messketten.
Eine weitere Anwendung ist die Erzeugung eines individuellen Frontends für ein Gerät, das nicht als Default-Setup implementiert ist.
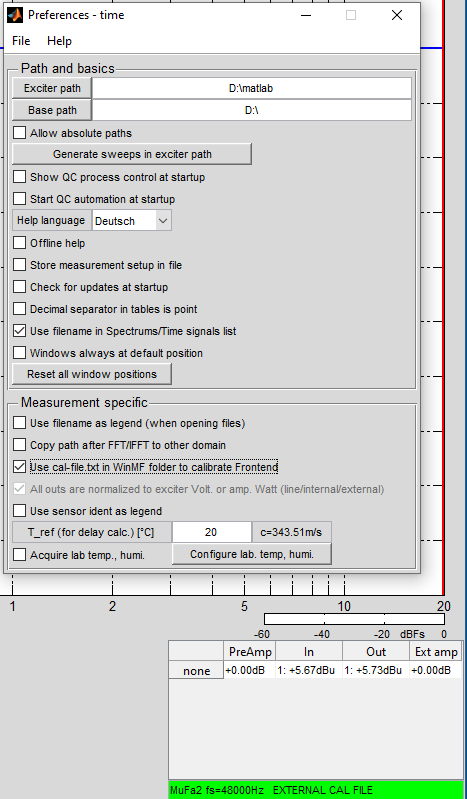
Um in WinMF ein solches File zu verwenden muss in Preferences die Use cal-file.... Option aktiviert werden. Es wird dann automatisch All outs are normalized ... mit aktiviert. Wenn Use cal-file.... aktiviert ist, sucht WinMF in seinem Startpfad nach einer Datei mit dem Namen: cal-file.txt
und liest dieses File ein, interpretiert die Einträge und überschreibt das existierende Frontend mit den dort gefundenen Werten. Wenn mindestens ein verwertbarer Eintrag gefunden wird, dann erscheint unten rechts im Display die grün hinterlegte Information, dass ein EXTERNAL CAL FILE verwendet wird:
Wenn kein File gefunden wird, dann ignoriert WinMF diese Option und es wird das Frontend wie zuletzt konfiguriert verwendet. Wenn das File ungültig ist, wird eine Fehlermeldung angezeigt.
Definition von cal-file Einträgen
Ein Cal-file wird eingeleitet mit dem Frontend Namen in der ersten Zeile. Dieser Name muss mit dem internen Namen des Frontends übereinstimmen. Groß- und Kleinschreibung werden dabei ignoriert.
Die Liste gültiger Frontendnamen ist:
- Babyface_Pro_FS
- DBS1
- Digital
- Fireface
- Fireface_UCX2
- Fireface_UFX_Plus
- Motu_M2
- MuFa2
- Robo2
- Robo2_Fireface_UCX
- Robo2_Fireface_UCX2_CH5_6
- Robo2_Fireface_UCX_CH5_6
- Robo3
- Special_2x_Robo3
- Special_4x_Robo3
Configuration
Ein gültiger Eintrag bezieht sich auf genau einen Parameter eines Kanals. Es gibt vier konfigurierbare Kanaltypen, die wie folgt aufgebaut sind:
type
sensor
kanalnummer (1...max_kanäle)
sens
sensitivity faktor als float mit punkt als dezimalseparatortype
in,out
kanalnummer (1...max_kanäle)
sel_sensitivity
nummer des elements der popupmenu liste
sensitivity_dBu
sensitivity in dBu als float mit punkt als dezimalseparatortype
out
kanalnummer (1...max_kanäle)
int_gain
gain in dB als float mit punkt als dezimalseparatortype
out
kanalnummer (1...max_kanäle)
ext_gain
gain in dB als float mit punkt als dezimalseparatorMultiface II example
MuFa2
type
out
1
sel_sensitivity
1
sensitivity_dBu
5.73type
out
1
sel_sensitivity
2
sensitivity_dBu
15.71type
in
1
sel_sensitivity
1
sensitivity_dBu
14.43Es wird für das Frontend Multiface II (MuFa2) Folgendes gesetzt
- Ausgang Kanal 1, erste Stufe der Sensitivity = 5.73dBu
- Ausgang Kanal 1, zweite Stufe der Sensitivity = 15.71dBu
- Eingang Kanal 1, erste Stufe der Sensitivity = 14.43dBu
Robo3 Beispiel
robo3
type
sensor
1
sens
0.0078type
in
1
sel_sensitivity
4
sensitivity_dBu
26.3type
out
2
int_gain
0.1type
out
2
ext_gain
26Es wird für das Frontend Robo3 Folgendes gesetzt
- Kanal 1, Sensor Sensitivity = 0.0078
- Eingang Kanal 1, vierte Stufe der Sensitivity = 26.3dBu
- Ausgang Kanal 2, internal amp gain = 0.1dB
- Ausgang Kanal 2, external amp gain = 26dB